2. Planit

Planet, Plan it,
Planit
Planit
Planit is a new concept of plant from our planet Earth which interacts with human's motions. Just grab your kettle and make a move, then Planit will respond. Planit can be placed anywhere & anytime, whenever you miss the delightful interaction from the Earth.


Planit 1.
SHY
SHY
As you approach to your Planit, you’ll find a twisted plant. She has a quite shy personality, so she barely shows her inside. You know she’s shy, so please act first with kindness by tilting the kettle as you’re giving water. When you tilt your kettle towards this shy Planit, it will start responding by rotating herself.


Plant 2.
WINDY
This Planit likes warm breeze. Whenever he gets some wind, he dances with a delightful movement. To make him feel delighted, make some wind by blowing breathe to the spout of the kettle. If you blow with your mouth into the kettle, he will respond to you by moving up and down reapetedly.


Working process

Concept

The key value we chose to take with us to the next universe, is the interaction between human and plants.
We focused on the nostalgic memories from childhoods. How do you feel when you think of childhood memories with plants?
The interaction between plants might have been felt like a magic, and sometimes, you might even thought that each plants are having a unique characteristics like humans.
We focused on the nostalgic memories from childhoods. How do you feel when you think of childhood memories with plants?
The interaction between plants might have been felt like a magic, and sometimes, you might even thought that each plants are having a unique characteristics like humans.
We wanted to get the core interactions into a set of products, and make each set of plant have a unique characteristic that anyone can easily feel empathy to. Planit is a artificual plant cluster that reacts to human's interaction, and each plant has a different character.
01 Form & Movement Study
We wanted to deliver the delightful movement of living plants. At first, we prototyped some fold structured papers with variations by shape, angle and materials. After some experiments, we’ve sought a more stream-lined, bouncy movement will fit better on our concept.
02 Movement study with servo motor
A more unique movement was found in this stage. We’ve attached a thread to both ends of the cut-off foam so that it can move up and down flexibly. The structure wasn’t solid by itself since it moved downwards in a irregular way. The center of gravity was moving continuously each time the servo moved.
03 Fixture
What we needed was a solid structure with a fixture to the center of gravity. The thread could be firmly fixed to the paper in this stage. Also, we’ve finalized our material in this stage by prototyping with various materials such as different types of papers, pelts, and the last to using Eva foam.
We wanted to deliver the delightful movement of living plants. At first, we prototyped some fold structured papers with variations by shape, angle and materials. After some experiments, we’ve sought a more stream-lined, bouncy movement will fit better on our concept.
02 Movement study with servo motor
A more unique movement was found in this stage. We’ve attached a thread to both ends of the cut-off foam so that it can move up and down flexibly. The structure wasn’t solid by itself since it moved downwards in a irregular way. The center of gravity was moving continuously each time the servo moved.
03 Fixture
What we needed was a solid structure with a fixture to the center of gravity. The thread could be firmly fixed to the paper in this stage. Also, we’ve finalized our material in this stage by prototyping with various materials such as different types of papers, pelts, and the last to using Eva foam.



04 Support & Final Structure
A support below the plant was made on the outside of the plant so that the thread
could wind in both directions like a yo-yo, allowing the paper plant to move up and down.
![]()
![]()
![]()
![]()
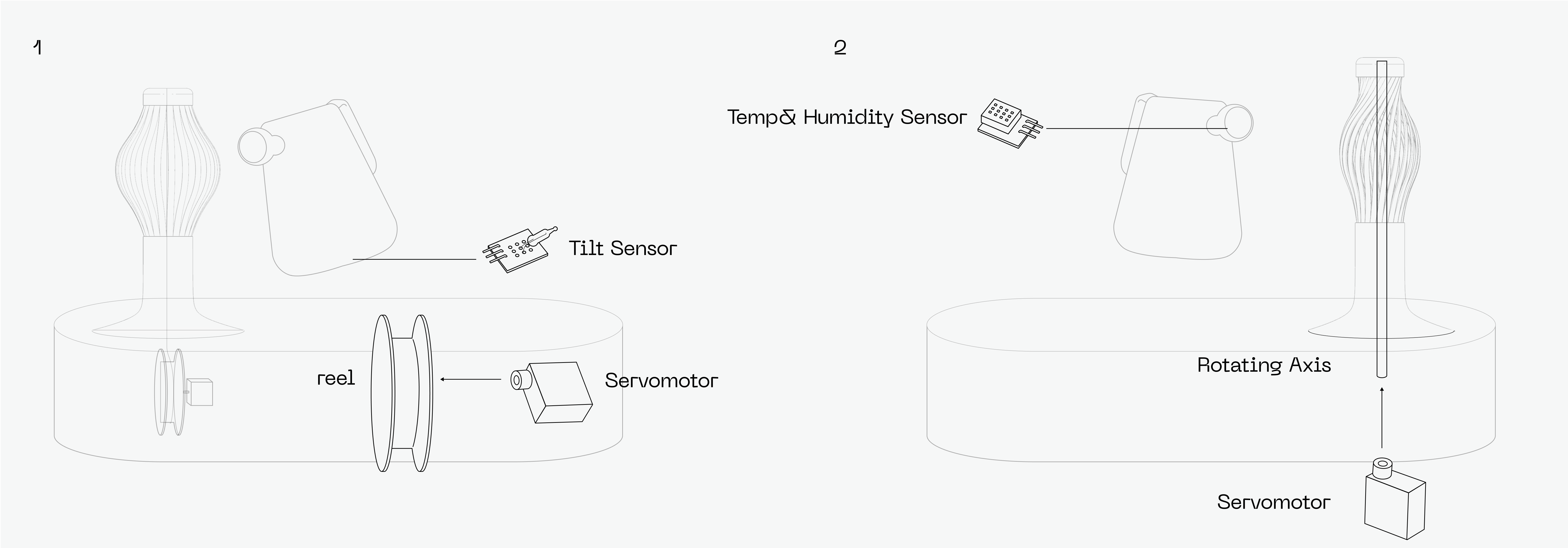
For Planit 1.SHY, we used tilt sensor and servo motor to get angle data from the kettle’s. if(val==HIGH), servo2.write(180~0)
For Planit 2.WINDY, we used thermistor and continuous servo motor to get humidity data of the breathe.
if(humid>75), servo2.write(0~180~90)
05 Making & Arrangement
![]()
To give visible hints for interactions, we used two color for each interactions as signifiers : Purple and Skyblue Also, we used watering can as a device for input so that afford people to tilt it towards Plant 1. We used the inlet as a hidden input for Plant 2.
A support below the plant was made on the outside of the plant so that the thread
could wind in both directions like a yo-yo, allowing the paper plant to move up and down.



For Planit 1.SHY, we used tilt sensor and servo motor to get angle data from the kettle’s. if(val==HIGH), servo2.write(180~0)
For Planit 2.WINDY, we used thermistor and continuous servo motor to get humidity data of the breathe.
if(humid>75), servo2.write(0~180~90)
05 Making & Arrangement

To give visible hints for interactions, we used two color for each interactions as signifiers : Purple and Skyblue Also, we used watering can as a device for input so that afford people to tilt it towards Plant 1. We used the inlet as a hidden input for Plant 2.



